The thrust to weight ratio TWR = T / W is the main dynamic characteristic that will determine your drone flight profile. To maintain steady flight, your TWR needs to be equal to one (see Figure 1). However, to take off you will need TWR > 1 so you have a net acceleration upwards. When flying, the angle of attack of the drone (ie the tilt angle alpha in Figure 2) causes the thrust vector to have vertical and horizontal components. This requires the TWR to be at least 1.3 for an approximate maximum angle of attack of 40 degrees.
A general rule of thumb is that the drone motors should be able to provide twice as much thrust as the weight of the drone. If the thrust provided by the motors is too little, you will experience poor flight performance. If you have 4 motors, and want to achieve a TWR of 2, then each motor needs to produce thrust that is equal to half of the drone weight.
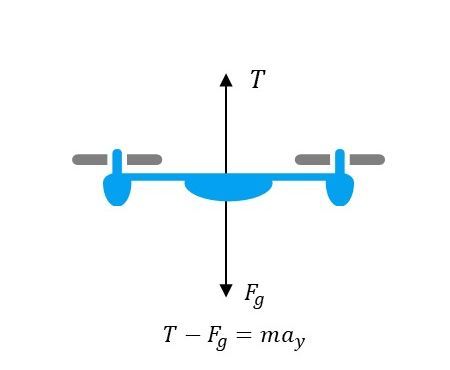
Fig 1. Thrust vs Gravity
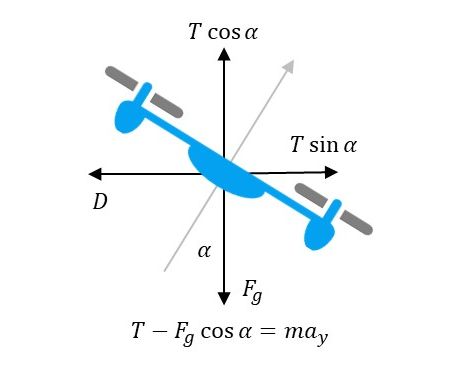
Fig 2. Drone Flight Motion